Allgemeine Informationen rund um die Kurse von Prof. Dr. B. Giesler
- Dozent/in: Björn Giesler
Upon completion of the module, students will be able to:
- Demonstrate an understanding of the fundamental principles underlying sensor networks.
- Explain the key concepts and mechanisms of communication within sensor networks.
- Apply advanced linear and non-linear digital signal processing to a multitude of sensors.
- Describe and model the most common sensors used in sensor fusion applications.
- Implement basic algorithms for simultaneous localisation and mapping (SLAM).
- Apply sensor fusion to different sensors like cameras, radar, etc..
- Use AI methods like, e.g., federated learning to the field of sensor fusion and sensor networks.
- Dozent/in: Björn Giesler
The project can be conducted in English or in German. Choice will be made by the project teams in the first session.
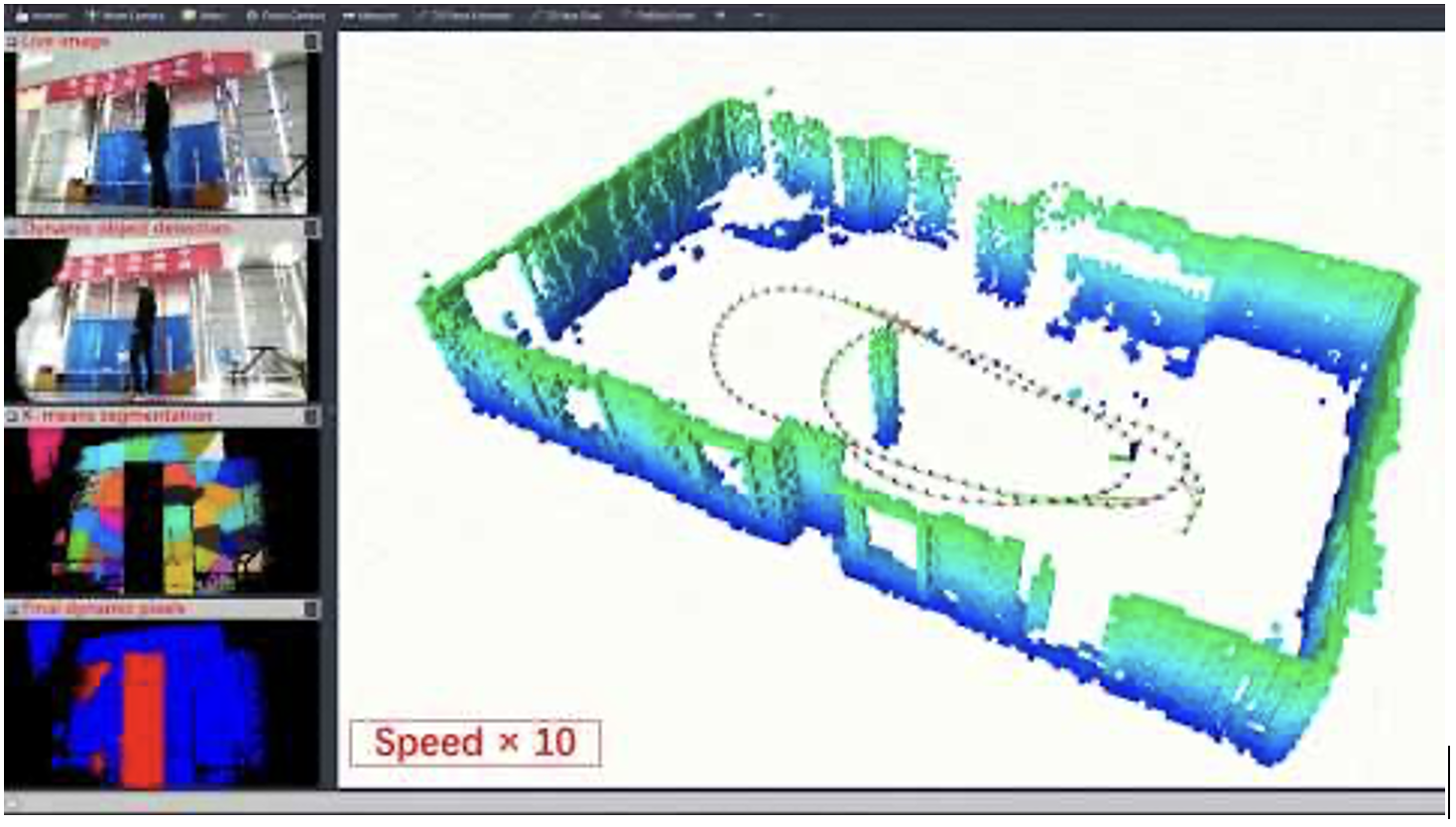
English Description: This project focuses on odometry and position estimation for autonomous robots using self-generated maps (Simultaneous Localization and Mapping – SLAM). Particular attention is paid to the initial positioning of the robot "after power-on" within a previously created map. The sensors employed are RGBD cameras, commonly used in robotics; these cameras provide distance information in addition to color at each pixel. Wheel encoders and inertial measurement systems are also used. The robot travels on Mecanum wheels ("omniwheels"), enabling it to move in any direction and rotate simultaneously.
The development language used is Python, with C++ being used to a lesser extent.
Contents:
- Introduction to ROS2
- Fundamentals of Odometry
- Mathematical Foundations: Linear Algebra, Coordinate Transformations
- Differentially and Holonomically Driven Robots
- Dead reckoning Navigation with Single-Wheel Encoders and Inertial Measurement Systems
- Odometry Correction with 3D Sensors
- Creation of Environment Maps
- Detection of Mapping Features with Convolutional Networks (CNNs)
- Robot "Location" in an Existing Map
- Feature Map Creation with Extended Kalman Filters
- Loop Closing
- Feature Enhancement with Transformer Models
German Description: Das Projekt beschäftigt sich mit der Odometrie und Positionsschätzung autonom fahrender Roboter in selbsterstellten Karten (Simultaneous Localization And Mapping – SLAM). Besonders behandelt wird die initiale Positionierung des Roboters „nach dem Einschalten“ in einer vorher erstellten Karte. Als Sensorik kommen die im Robotik-Bereich beliebten RGBD-Kameras zum Einsatz, also Kameras, die in jedem Bildpunkt nicht nur Farb- sondern auch Entfernungsinformation liefern. Ebenso wird mit Radencodern und inertialen Messsystemen gearbeitet. Der Roboter fährt auf Mecanum-Rädern („Omniwheels“), kann also in beliebige Richtung fahren und gleichzeitig drehen.
Als Entwicklungssprache kommen Python und zum geringen Teil C++ zum Einsatz.
Inhalt:
- Robot Operating System ROS2
- Grundlagen der Odometrie
- Mathematische Grundlagen: Lineare Algebra, Koordinatentransformationen
- Differentiell und holonom angetriebene Roboter
- Koppelnavigation mit Einzelrad-Encodern und Inertialen Messsystemen
- Odometrie-Korrektur mit 3D-Sensorik
- Erstellung von Umfeldkarten
- Detektion kartierbarer Merkmale mit Faltungsnetzen (CNNs)
- „Wiederfinden“ des Roboters in einer existierenden Karte
- Erstellung von Merkmalskarten mit Extended Kalman Filtern
- Loop Closing
- Verbesserung von Merkmalen mit Transformer-Modellen
- Dozent/in: Björn Giesler
Upon completion of the module, students will be able to:
- Distinguish between verification and validation of machine-learning (ML) systems.
- Understand the risks and consequences of false decisions by ML algorithms.
- Apply classical and contemporary verification techniques to ML models.
- Reflect critically on the societal and ethical ramifications of ML errors.
- Requirements for real-world ML: ISO and societal expectations
- Introduction to ML Verification: The “black-box” nature of modern ML, correctness, robustness, interpretability
- Motivation and Challenges: Lack of formal specifications
- Verification vs. Validation: Definitions and examples, Role of statistical evaluation vs. formal guarantees
- False Decisions in ML Systems: Taxonomy of failures, Root causes: bias in data, model brittleness, distributional drift
- Techniques for Verifying Correctness: Probe points, Large-scale phenomenological testing
- Classical formal methods applied to ML (symbolic execution, model checking, SMT solvers),
- Societal and Ethical Implications: Accountability in algorithmic decisions, fairness, transparency, and justice
- Dozent/in: Björn Giesler